本试题 “某同学在做“研究杠杆平衡条件”的实验进行了如下实验步骤.a.把杠杆的中点支在支架上;b.把钩码挂在杠杆的两边,改变钩码的位置使杠杆水平平衡;c.记下两边...” 主要考查您对杠杆的平衡条件
杠杆的动态平衡分析
等考点的理解。关于这些考点您可以点击下面的选项卡查看详细档案。
- 杠杆的平衡条件
- 杠杆的动态平衡分析
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂。
即
在杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之几。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
例:如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO= 2OB。固定D点,使OB处于水平位置,此时B端挂一重为40N的物体,要使杠杆不发生转动,至少需在A端施加F=____N的力,在图上画出此时力F的方向。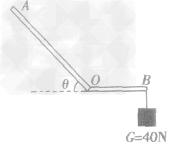
解析:要想得到施加在A点的最小力,就要找到最大力臂,由图可知,最大力臂应是OA,故过A点作们的垂线,方向斜向下即为最小力。据杠杆平衡条件得:F·OA=G·OB,代入数值为F×2OB=40N×OB,解方程得F=20N。
答案:20 力F的方向如图
实验法探究杠杆平衡条件:
实验前要调节杠杆的平衡螺母使其在水平位置上平衡,目的是使杠杆的重心落在支点上,从而消除杠杆的重力对平衡的影响。当杠杆水平平衡时,O点距悬挂钩码处的距离便是力臂,而且可用杠杆上的“格数”代替力臂大小。
例:我们都做过“探究杠杆平衡条件”的实验。
(1)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。实验前使杠杆水平平衡的目的是____.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒大家不要采用这种方式。这主要是因为该种方式( )
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第____格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。 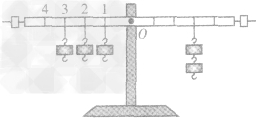
解析:(1)实验前要调节杠杆的平衡螺母使其在水平位置平衡,目的是方便地测量力臂。调节方法是将平衡螺母向杠杆偏高的一端调,即哪端轻向哪端调。
(2)探究杠杆平衡条件时,用的力和力臂数目过多,每个力都会给杠杆转动带来影响,给探究过程带来麻烦。
(3)根据杠杆平衡条件 ,即
,即
 ,所以l1=2(格)。
,所以l1=2(格)。
答案:(1)右方便地测量力臂(2)D(3)2
利用杠杆平衡条件求最小力的方法:
由公式 可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
1.寻找最大动力臂的方法
(1)当动力作用点确定后,支点到动力作用点的线段即为最大动力臂;
(2)动力作用点没有规定时,应看杠杆上哪一点离支点最远,则这一点到支点的距离即为最大动力臂。
2.作最小动力的方法
(1)找到最大动力臂后,过作用点作动力臂的垂线;
(2)根据实际,动力能使杠杆沿阻力作用的反方向转动,从而确定动力的方向。
杠杆的平衡状态:
杠杆静止不动或匀速转动都叫做杠杆平衡,注意我们在实验室所做的杠杆平衡条件的实验,是在杠杆水平位置平衡进行的,但在实际生产和生活中,这样的平衡是不多的,在许多情况下,杠杆是倾斜静止的,这是因为杠杆受到平衡力作用。所以说杠杆不论处于怎样的静止,都可以理解成处于平衡状态。
杠杆动态平衡问题:
杠杆动态平衡的几种类型杠杆动态平衡是指构成杠杆的某些要素发生变化,而杠杆仍处于静止状态或匀速转动状态,
分析杠杆的动态平衡时,一般是动中取静,根据杠杆平衡条件,分析比较,得出结论。下面就杠杆动态平衡问题归类分析。
一、 阻力一定,判断动力的变化情况
1、l1不变,l2变化
例1、如图1所示,轻质杠杆可绕O转动,在A点始终受一垂直作用于杠杆的力,在从A转动A/位置时,力F将()
A、变大
B、变小
C、先变大,后变小
D、先变小,后变大 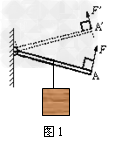
分析:当杠杆在水平面以下上升到水平面上时,l1不变,l2增大,由 ,F增大,当杠杆从水平面继续上升过程中,l2减小,所以F减小。
,F增大,当杠杆从水平面继续上升过程中,l2减小,所以F减小。
2、l2不变,l1变化
例2、如图2所示,轻质杠杆OA的B点挂着一个重物,A端用细绳吊在圆环M下,此时OA恰成水平且A点与圆弧形架PQ的圆心重合,那么当环M从P点逐渐滑至Q点的过程中,绳对A端的拉力大小将()
A、保持不变
B、逐渐增大
C、逐渐减小
D、由大变小再变大 
分析:当M点从P点滑至Q点的过程中,我们分两个过程分析,
一是从P点滑至竖直位置,动力臂l1逐渐增大(同学们不妨作出这两点的动力臂),由 知F逐渐变小;
知F逐渐变小;
二是从竖直位置到Q点,动力臂逐渐减小,所以又逐渐增大。故选D。
3、l1与l2同时变化,但比值不变
例3、用图3所示的杠杆提升重物,设作用在A端的力F始终竖直向下,在将重物慢慢提升到一定高度的过程中,F的大小将()
A、保持不变
B、逐渐变小
C、逐渐变大
D、先变大,后变小 
分析::F始终竖直向下,与阻力作用线平行,分别作出F与G的力臂l1和l2,构建两个相似三角形(同学们不妨在图中作出),可以看出, 为定值,由杠杆平衡条件,
为定值,由杠杆平衡条件, ,得
,得 ,所以,F大小不变。
,所以,F大小不变。
4、l1与l2同时变化
例4、如图4所示,一个直杠杆可绕轴O转动,在直杆的中点挂一重物,在杆的另一端施加一个方向始终保持水平的力F,将直杆从竖直位置慢慢抬起到水平位置过程中,力F大小的变化情况是()
A、一直增大
B、一直减小
C、先增大后减小
D、先减小后增大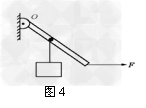
分析:将直杆从竖直位置慢慢抬起到水平位置过程中,l1变小,l2变大,由 知,F一直在增大。
知,F一直在增大。
二、动力与阻力不变,动力臂与阻力臂变化
例5、如图5所示,用一细线悬挂一根粗细均匀的轻质细麦桔杆,使其静止在水平方向上, O为麦桔杆的中点.这时有两只蚂蚁同时从O点分别向着麦桔杆的两端匀速爬行,在蚂蚁爬行的过程中麦桔杆在水平方向始终保持乎衡,则()
A、两蚂蚁的质量一定相等
B、两蚂蚁的爬行速度大小一定相等
C、两蚂蚁的质量与爬行速度大小的乘积一定相等
D、两蚂蚁对麦桔杆的压力一定相等 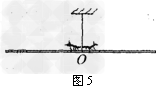
分析:蚂蚁爬行的过程中麦桔杆始终保持乎衡,有 ,即
,即 ,所以
,所以 。故选C。
。故选C。
三、动力臂与阻力臂不变,动力与阻力改变
例6、如图6所示的轻质杠杆,AO小于BO.在A、B两端悬挂重物(同种物质)G1和G2后杠杆平衡.若将G1和G2同时浸没到水中则()
A、杠杆仍保持平衡
B、杠杆的A端向下倾斜
C、杠杆的B端向下倾斜
D、无法判断
分析:在空气中,杠杆平衡,故有 ;G1和G2同时浸没到水中,有
;G1和G2同时浸没到水中,有 ,说明杠杆仍然平衡。故选A。
,说明杠杆仍然平衡。故选A。
杠杆的转动:
判断杠杆平衡的依据是:“动力×动力臂”是否等于“阻力×阻力臂”。若二者相等,杠杆平衡;若二者不相等,则杠杆不平衡,且杠杆会向“乘积”大的一方倾斜。
例如图所示,杠杆在水平位置处于平衡状态,杠杆上每格均匀等距,每个钩码都相同。下列四项操作中,会使杠杆左端下倾的是( )
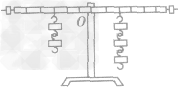
①在杠杆的两侧同时各减掉一个钩码;②在杠杆的两侧钩码下同时各加挂一个相同的钩码;④将杠杆两侧的钩码同时各向外移动一个小格;④将杠杆两侧的钩码同时各向内移动一个小格。
A.①③B.②④C.②③D.①④
解析根据杠杆的平衡条件,当左边力与力臂的乘积等于右边力与力臂的乘积时,杠杆平衡。哪一边乘积大,哪一边下降,可对本题四种情况逐一分析,最后作出判断。
答案B
与“某同学在做“研究杠杆平衡条件”的实验进行了如下实验步骤.a....”考查相似的试题有:
- 一根硬棒,在 下能绕着 转动,这根硬棒就是杠杆。支点是 ;动力是 ;阻力是 ;阻力臂是 。在日常生活中我们使用的工具属于杠...
- 如图所示,杠杆在力F1、F2的作用下处于平衡状态,O为支点,l1是力F1的力臂,在图中画出F2的力臂和动力F1。
- 请在图中画出使杠杆OA平衡时最小动力F1的示意图和阻力F2的力臂L2。
- 如图所示,杆AB可绕A点转动,物重G=100 N,AB杆重不计,绳子BC =50 cm,杆AB =40 cm,则绳子CB的拉力为 N。
- 如图所示,将一根粗细均匀的木头的一端搁在地上,另一端始终用竖直向上的力F向上慢慢地抬木头,在抬起的过程中,F的大小将[ ]...
- 图所示为某一型号的汽车油量显示装置示意图,它能自动测定汽车油箱内油量的多少。R1是滑动变阻器,油量表相当于电流表,从油...
- 用动力臂是阻力臂12倍的撬棒撬重为1800N的石头,所用动力至少是______N.
- 在A点画出使杠杆在图示位置平衡的最小力F的示意图.
- 图中均匀木尺重10牛,A物体重30牛,B物体重20牛.为了使杠杆平衡,需在B端施加一个方向向______,大小为______牛的力.
- (1)请你在图1中画出用滑轮组提升重物的最省力的绕绳方法.(2)如图2所示,画出杠杆所受动力F的力臂.(3)小军用钉锤拔钉...