本试题 “小文同学学习了有关物理知识后,设想制作一个电动充气泵.她画出了如图所示的结构示意图,图中E为电流大小和方向都不断变化的交流电.(1)你认为小文的设想...” 主要考查您对磁极间的相互作用
安培定则(右手螺旋定则)
电磁继电器
杠杆的平衡条件
等考点的理解。关于这些考点您可以点击下面的选项卡查看详细档案。
- 磁极间的相互作用
- 安培定则(右手螺旋定则)
- 电磁继电器
- 杠杆的平衡条件
同名磁极互相排斥,异名磁极互相吸引。
磁极颠倒:
地球磁极倒转造成的后果相当严重,将影响整个自然界。专家们指出,最大的灾难莫过于强烈的太阳辐射?。平时,这些宇宙射线在太空中就被地球磁场吞没了。然而地球两极倒转过程中一旦地球磁场消失,这些太阳粒子风暴将会猛击地球大气层,对地球气候和人类命运产生致命的影响。这一天如果真的到来,一些低轨道人造卫星也将完全暴露在太阳电磁风暴的吹打中,不久就会被完全摧毁。
这些变化将给卫星等航天器带来巨大危险,因为地球磁场对于来自外太空的高能量辐射有保护作用,就好像给卫星等航天器穿上了一层防辐射服。如果地球磁场发生了变化,那么围绕地球旋转的成千上万颗卫星和其他航天器将失去地球磁场的保护,它们将毫无保护地受到外太空高能辐射。
另外,许多靠地球磁场导航的生物,诸如燕子、羚羊、鲸鱼、鸽子?和趋磁性细菌等,都会迷失方向。
通电直导线中的安培定则(安培定则一):用右手握住通电直导线,让大拇指指向电流的方向,那么四指的指向就是磁感线的环绕方向;
通电螺线管中的安培定则(安培定则二):用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端是通电螺线管的N极。
性质:
直线电流的安培定则对一小段直线电流也适用。环形电流可看成多段小直线电流组成,对每一小段直线电流用直线电流的安培定则判定出环形电流中心轴线上磁感强度的方向。叠加起来就得到环形电流中心轴线上磁感线的方向。直线电流的安培定则是基本的,环形电流的安培定则可由直线电流的安培定则导出,直线电流的安培定则对电荷作直线运动产生的磁场也适用,这时电流方向与正电荷运动方向相同,与负电荷运动方向相反。
定义:
电磁继电器是通过电磁铁,利用低电压、弱电流的通断,来控制高电压、强电流电路的装置。
实质:
电磁继电器的实质是一个由电磁铁控制的开关。
工作原理:
电磁铁通电时,把衔铁吸下来,使动触点和静触点接触,工作电路闭合,电磁铁断电时,电磁铁失去磁性,弹簧把衔铁拉起来,切断工作电路。

杠杆的平衡条件:
动力×动力臂=阻力×阻力臂。
即
在杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之几。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
例:如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO= 2OB。固定D点,使OB处于水平位置,此时B端挂一重为40N的物体,要使杠杆不发生转动,至少需在A端施加F=____N的力,在图上画出此时力F的方向。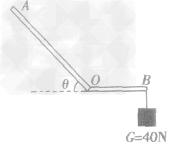
解析:要想得到施加在A点的最小力,就要找到最大力臂,由图可知,最大力臂应是OA,故过A点作们的垂线,方向斜向下即为最小力。据杠杆平衡条件得:F·OA=G·OB,代入数值为F×2OB=40N×OB,解方程得F=20N。
答案:20 力F的方向如图
实验法探究杠杆平衡条件:
实验前要调节杠杆的平衡螺母使其在水平位置上平衡,目的是使杠杆的重心落在支点上,从而消除杠杆的重力对平衡的影响。当杠杆水平平衡时,O点距悬挂钩码处的距离便是力臂,而且可用杠杆上的“格数”代替力臂大小。
例:我们都做过“探究杠杆平衡条件”的实验。
(1)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。实验前使杠杆水平平衡的目的是____.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒大家不要采用这种方式。这主要是因为该种方式( )
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第____格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。 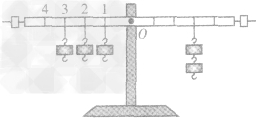
解析:(1)实验前要调节杠杆的平衡螺母使其在水平位置平衡,目的是方便地测量力臂。调节方法是将平衡螺母向杠杆偏高的一端调,即哪端轻向哪端调。
(2)探究杠杆平衡条件时,用的力和力臂数目过多,每个力都会给杠杆转动带来影响,给探究过程带来麻烦。
(3)根据杠杆平衡条件 ,即
,即
 ,所以l1=2(格)。
,所以l1=2(格)。
答案:(1)右方便地测量力臂(2)D(3)2
利用杠杆平衡条件求最小力的方法:
由公式 可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
1.寻找最大动力臂的方法
(1)当动力作用点确定后,支点到动力作用点的线段即为最大动力臂;
(2)动力作用点没有规定时,应看杠杆上哪一点离支点最远,则这一点到支点的距离即为最大动力臂。
2.作最小动力的方法
(1)找到最大动力臂后,过作用点作动力臂的垂线;
(2)根据实际,动力能使杠杆沿阻力作用的反方向转动,从而确定动力的方向。
与“小文同学学习了有关物理知识后,设想制作一个电动充气泵.她...”考查相似的试题有:
- 如图所示,在电磁铁正上方用弹簧挂着一条形磁铁,开关闭合后,当滑片P从a端向b端滑动过程中,会出现的现象是[ ]A.电流表示数...
- 通电螺线管周围的磁感线分布与______相似,它两端的磁极与______有关,可以用______判断通电螺线管的极性跟电流方向的关系.
- 小文设计了如图甲所示的实验研究电磁现象,当他闭合开关S后,发现小磁针发生了偏转,这说明______的周围存在着磁场.接着小文...
- 某同学在“探究通电螺线管的外部磁场”的活动中,用漆包线绕制一只螺线管,接入如图所示的电路中,闭合开关S后,螺线管的下端为...
- 如图所示,两电池的规格相同,当开关S由触点2转到触点1时,螺线管磁性强弱和A端磁极极性变化的情况是[ ]A.磁性增强,由S极变...
- 如图中,一个有均匀刻度的轻质杠杆在水平位置平衡,物A重3N,此时弹簧秤示数为( )A.1NB.2NC.3ND.4N
- 如图(a)所示的杠杆是平衡的,在此杠杆支点两侧的物体下方分别加挂一个物体,如图(b)所示,那么,以下说法中正确的是[ ]A...
- 在图中,画出使轻质杠杆保持平衡的最小的力F的示意图(要求保留作图痕迹).
- 在学校科技月活动中,科技小组的同学设计了一个小型锅炉,其部分结构如图所示。 下面是对锅炉结构的介绍:调控水箱高1.5m,其...
- 小明在学校参加植树活动时,使用如图所示的钢丝钳,剪铁丝固定小树苗。(1)他使用的钳子是省力杠杆还是费力杠杆?(2)在图...