本试题 “杠杆的平衡条件是指杠杆处于______或______状态,杠杆的平衡条件是:______.力臂是指从______的距离;” 主要考查您对杠杆及其五要素
杠杆的平衡条件
等考点的理解。关于这些考点您可以点击下面的选项卡查看详细档案。
- 杠杆及其五要素
- 杠杆的平衡条件
一根在力的作用下能绕着固定点转动的硬棒就叫杠杆。

和杠杆的五要素:
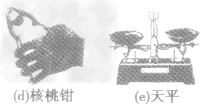
①支点:杠杆绕着转动的点(o)
②动力:使杠杆转动的力(F1)
③阻力:阻碍杠杆转动的力(F2)
④动力臂:从支点到动力的作用线的距离(L1)。
⑤阻力臂:从支点到阻力作用线的距离(L2) 。
一根硬棒成为杠杆的条件:
①要有力的作用
②能绕某固定点转到
对概念的理解:
(1)杠杆可以是直的,也可以是弯的。,但在外力的作用下不能变形。例如:撬棒、跷跷板、抽水机、手柄等。
(2)定义中的力,是指作用在杠杆上的动力和阻力,且动力和阻力使杠杆转动的方向一定是相反的,但动力和阻力不一定相反。
(3)杠杆在力的作用下,绕固定点转动而不是平动。
(4)不论动力和阻力,杠杆都是受力物体,作用于杠杆的物体都是施力物体。
(5)阻力绕支点转动的方向与动力绕支点转动的方向相反。
(6)不可把从动力作用点到支点的距离作为动力臂,或把从阻力作用点到支点的距离作为阻力臂。
生活中杠杆支点的辨别方法:
支点是相对于杠杆不动的点,但支点一定在杠杆上,支点不一定与动力作用点和阻力作用点在同一直线上,也不一定在动力作用点和阻力作用点之间。若让力的作用线恰好过支点,则力臂是零,这个力不能使杠杆转动。
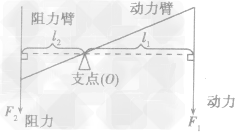
例:列车上有出售食品的手推车(如图所示)。若货物在车内摆放均匀,当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是____ ,(写出字母);当后轮遇到障碍物A时,售货员向上提扶把,这时支点是____。
解析:把手推车视为杠杆,当前轮口遇到阻碍时,在E点向下用力时,车身转动;而车轮C却保持相对静止,所以C点为支点;当后轮C遇到阻碍时,人从 E点向上用力,车身转动而车轮B点相对静止。所以此时的支点为B点。
答案:C B
简单机械知识梳理:
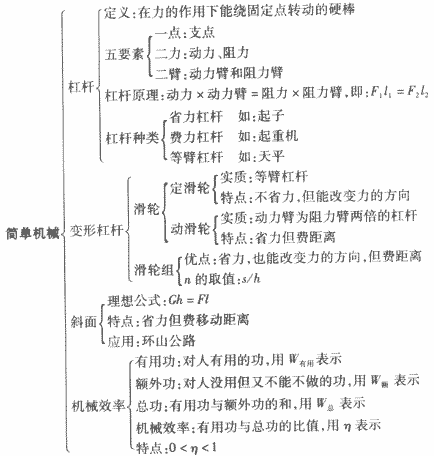
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂。
即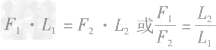
在杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之几。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
例:如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO= 2OB。固定D点,使OB处于水平位置,此时B端挂一重为40N的物体,要使杠杆不发生转动,至少需在A端施加F=____N的力,在图上画出此时力F的方向。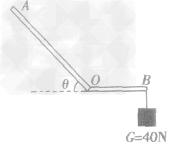
解析:要想得到施加在A点的最小力,就要找到最大力臂,由图可知,最大力臂应是OA,故过A点作们的垂线,方向斜向下即为最小力。据杠杆平衡条件得:F·OA=G·OB,代入数值为F×2OB=40N×OB,解方程得F=20N。
答案:20 力F的方向如图
实验法探究杠杆平衡条件:
实验前要调节杠杆的平衡螺母使其在水平位置上平衡,目的是使杠杆的重心落在支点上,从而消除杠杆的重力对平衡的影响。当杠杆水平平衡时,O点距悬挂钩码处的距离便是力臂,而且可用杠杆上的“格数”代替力臂大小。
例:我们都做过“探究杠杆平衡条件”的实验。
(1)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。实验前使杠杆水平平衡的目的是____.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒大家不要采用这种方式。这主要是因为该种方式( )
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第____格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。 
解析:(1)实验前要调节杠杆的平衡螺母使其在水平位置平衡,目的是方便地测量力臂。调节方法是将平衡螺母向杠杆偏高的一端调,即哪端轻向哪端调。
(2)探究杠杆平衡条件时,用的力和力臂数目过多,每个力都会给杠杆转动带来影响,给探究过程带来麻烦。
(3)根据杠杆平衡条件 ,即
,即
 ,所以l1=2(格)。
,所以l1=2(格)。
答案:(1)右方便地测量力臂(2)D(3)2
利用杠杆平衡条件求最小力的方法:
由公式 可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
1.寻找最大动力臂的方法
(1)当动力作用点确定后,支点到动力作用点的线段即为最大动力臂;
(2)动力作用点没有规定时,应看杠杆上哪一点离支点最远,则这一点到支点的距离即为最大动力臂。
2.作最小动力的方法
(1)找到最大动力臂后,过作用点作动力臂的垂线;
(2)根据实际,动力能使杠杆沿阻力作用的反方向转动,从而确定动力的方向。
与“杠杆的平衡条件是指杠杆处于______或______状态,杠杆的平衡...”考查相似的试题有:
- (6分)如图所示,利用铁架台.带有刻度的杠杆.细线数量足够的钩码等实验器材探究杠杆的平衡条件。实验前杠杆如图所示,为使杠...
- 关于杠杆,下列说法中正确的是[ ]A.使用杠杆的目的都是为了省力B.从支点到力的作用点的距离叫力臂C.杠杆可以是直的,也可...
- 如图甲所示的钢丝钳,A为剪钢丝处,B为手的用力点,0为转动轴,乙为单侧钳柄及相连部分示意图.请在图乙中画出剪钢丝时的动力...
- 小明是学校的升旗手,他将一面国旗在国歌声中匀速升到旗杆顶端。请问:(1)旗杆顶端装有定滑轮,利用它来升国旗,目的是改变_...
- 如图所示,绳子OO′悬吊着质量忽略不计的杆,在杆的a点挂上重物G,在O右侧某点b处挂上钩码。重物G的质量及a到O的距离不变。要...
- 请仔细观察如图所示的漫画,判断小猴和小兔谁分的萝卜重[ ]A.小兔B.小猴C.一样重D.无法判断
- 从______点到______的垂直距离叫力臂.杠杆的平衡条件是:______.
- 在“探究杠杆平衡条件”的实验中,应先调节杠杆两端的平衡螺母,使杠杆在_________位置平衡,这样做是为了便于测量_________;...
- 在“研究杠杆平衡条件”的实验中,实验器材有支架、弹簧夹、杠杆、钩码和______.实验时,先要调节______,使杠杆在水平位置平...
- 如图所示,作用在杠杆左端且始终与杠杆垂直的力F,将杠杆由水平位置OA缓慢拉至OB,则在这个过程中力F将______(变大/变小/不...