本试题 “同学们在实验室进行“探究杠杆的平衡条件”的实验,所用杠杆上相邻刻线间距均为5cm,实验中使用的钩码每个重0.5N。(1)实验前,小宏发现杠杆如图甲所示,左端...” 主要考查您对弹簧测力计的使用与读数
杠杆的平衡条件
等考点的理解。关于这些考点您可以点击下面的选项卡查看详细档案。
- 弹簧测力计的使用与读数
- 杠杆的平衡条件
①首先看清它的量程,也就是它的测量范围,加存弹簧测力计上的力不允许超过它的量程:
②认清它的分度值,以便读数时快速准确;
③观察指针是否在零位置,若没有,需要校零;
④使用之前,最好轻轻拉几次它的挂钩,可以避免弹簧被壳子卡住;
⑤使用时,拉力方向应与弹簧轴线方向一致,确保测量准确
读数:
弹簧测力计的读数比较简单,要先搞清楚弹簧测力计的量程和分度值,然后再根据指针所指的位置(一定要看指针末端所指的位置)读出所测量力的大小。
弹簧测力计的具体使用方法:
使用前:
1.拉动弹簧:反复拉动弹簧(用力过度可能会损坏弹簧),防止其卡住,摩擦,碰撞。
2.了解量程:知道测量力的最大范围(量程)是多少。
3.明确分度值:了解弹簧测力计的刻度。知道每一大格,最小一格表示多少牛(N)。
4.校零:检查指针是否对齐零刻度线,若没有对齐,需要调节至对齐。
使用中:
1.不能超量程使用。(天平,量筒,量杯等都不能超量程使用,但刻度尺除外)(补充说明:因为超量程使用可能会损坏弹簧测力计,并且造成塑性形变,导致误差。而且超量程使用了,会导致测不出准确的力,比如一个6N的力,你用一个量程为5N的弹簧测力计测,指针指向5N,但是实际上是6N,就产生了误差。)
2.同方向:测力时,要让弹簧测力计内的弹簧轴线方向跟所测力的方向在一条直线上,且弹簧不能靠在刻度盘上。
3.视线要与刻度盘垂直。
使用后:
调节弹簧测力计,让指针对齐零刻度线。
提醒:
1. 如果指针在零刻度线以上或者以下,这时候没有把指针调节至0,就会产生误差。在零刻度线以上,测出来的力比实际的力小,反之在零刻度线以下,测出来的力比实际的力大。
2. 如果弹簧测力计侧放,会使测量数值偏小
实验法研究弹簧伸长量与所受拉力的关系:
1.常用测力计的原理与使用:测量力大小的工具称为测力计,实验室用的测力计就是弹簧测力计。弹簧测力计的工作原理是在弹性限度内,弹簧的伸长量跟所受托力成正比,即 ,注意伸长量的含义,弹 簧原来的长度通常用l0表示,受力后弹簧长为l,而△l =l-l0,称为伸长量△l或伸长了△l,也用x表示。
,注意伸长量的含义,弹 簧原来的长度通常用l0表示,受力后弹簧长为l,而△l =l-l0,称为伸长量△l或伸长了△l,也用x表示。
2.弹簧测力计的测量范围:在每个弹簧测力计上都标有最大刻度值,这个最大刻度值即为此弹簧测力计的测量范围,超过了此范围,弹簧测力计就可能被损坏了。
例:某同学在研究轻质弹簧的长度随拉力变化的关系时,进行了如图所示的实验。已知每个钩码重为0.5N,刻度尺的分度值是1mm。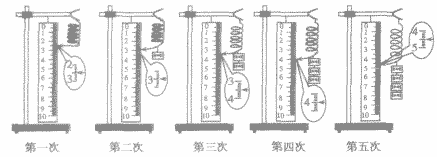
(1)请将观察到的数据填入实验记录表中;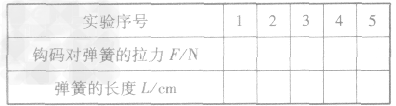
(2)根据实验数据,在图所示的坐标系内作出弹簧长度,L随拉力F变化的关系图像;
(3)此实验中弹簧长度L与拉力的关系是________
解析:(1)数据如表
(2)得到拉力与弹簧的长度关系: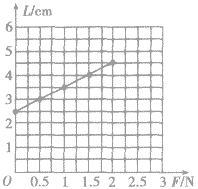
(3)在弹性限度内,弹簧的伸长量和所受拉力成正比。
量程与弹性限度:
弹簧的伸长与拉力成正比的规律是有一定的限度的,即加在弹簧上的力不能太大,拉力大到一定值以后,即超出弹簧的弹性限度后,弹簧的伸长就不再与拉力成正比,甚至无法恢复原状。弹簧测力计的量程就是弹簧测力计允许测量的力的最大值。
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂。
即
在杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之几。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
例:如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO= 2OB。固定D点,使OB处于水平位置,此时B端挂一重为40N的物体,要使杠杆不发生转动,至少需在A端施加F=____N的力,在图上画出此时力F的方向。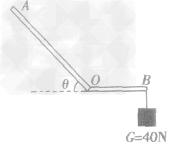
解析:要想得到施加在A点的最小力,就要找到最大力臂,由图可知,最大力臂应是OA,故过A点作们的垂线,方向斜向下即为最小力。据杠杆平衡条件得:F·OA=G·OB,代入数值为F×2OB=40N×OB,解方程得F=20N。
答案:20 力F的方向如图
实验法探究杠杆平衡条件:
实验前要调节杠杆的平衡螺母使其在水平位置上平衡,目的是使杠杆的重心落在支点上,从而消除杠杆的重力对平衡的影响。当杠杆水平平衡时,O点距悬挂钩码处的距离便是力臂,而且可用杠杆上的“格数”代替力臂大小。
例:我们都做过“探究杠杆平衡条件”的实验。
(1)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。实验前使杠杆水平平衡的目的是____.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒大家不要采用这种方式。这主要是因为该种方式( )
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第____格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。 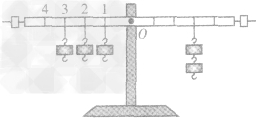
解析:(1)实验前要调节杠杆的平衡螺母使其在水平位置平衡,目的是方便地测量力臂。调节方法是将平衡螺母向杠杆偏高的一端调,即哪端轻向哪端调。
(2)探究杠杆平衡条件时,用的力和力臂数目过多,每个力都会给杠杆转动带来影响,给探究过程带来麻烦。
(3)根据杠杆平衡条件 ,即
,即
 ,所以l1=2(格)。
,所以l1=2(格)。
答案:(1)右方便地测量力臂(2)D(3)2
利用杠杆平衡条件求最小力的方法:
由公式 可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
1.寻找最大动力臂的方法
(1)当动力作用点确定后,支点到动力作用点的线段即为最大动力臂;
(2)动力作用点没有规定时,应看杠杆上哪一点离支点最远,则这一点到支点的距离即为最大动力臂。
2.作最小动力的方法
(1)找到最大动力臂后,过作用点作动力臂的垂线;
(2)根据实际,动力能使杠杆沿阻力作用的反方向转动,从而确定动力的方向。
与“同学们在实验室进行“探究杠杆的平衡条件”的实验,所用杠杆上...”考查相似的试题有:
- 如图所示,在弹簧测力计的两侧沿水平方向各加6N拉力并使其保持静止,此时弹簧测力计的示数为_____N。
- 同一块砖,分别用平放、侧放、竖放三种不同方式放在同一个弹簧测力计上测量,如图所示,测力计显示的示数是( ) A.甲的示数...
- (1)如图1,木块的长度是_________cm;(2)如图2,弹簧测力计的分度值是___________,物体的重力为__________N;(3)如图3...
- 测量一个约8N的力时,应选用最恰当的测力计规格是[ ]A、量程10N,分度值0.2NB、量程5N,分度值0.1NC、量程15N,分度值0.5ND、...
- 在研究杠杆的平衡条件的实验中,张华同学发现杠杆的位置如图(a)所示(1)张华应将右端的平衡螺母向______调节,使杠杆在水...
- 杠杆的平衡条件是 ,表达式是 .如果杠杆的动力臂是阻力臂的5倍,当杠杆平衡时,动力是阻力的 倍.如果作用在杠杆上的动力是8...
- 图是日常生活中杠杆的简单应用,其中属于费力杠杆的是[ ]A.B.C.D.
- 作出图中的铡刀使用时的两个力臂,并用L1和L2标明。
- 如图,慢慢将一根电线杆竖起。若力的方向总是竖直向上,在电线杆竖直抬起的过程中,力的大小将_______________;若力的方向总...
- 图是油压千斤顶的示意图,大活塞的直径是小活塞直径的5倍,大活塞上的重物G=5×103牛,O为支点,AB∶OB=3∶1。要将重物G举起来,...