本试题 “下图是汽车起重机从某深坑中起吊重物的示意图。A是动滑轮,B是定滑轮,C是卷扬机,D是油缸,E是柱塞,作用在动滑轮上共三股钢丝绳,在卷扬机带动下每股钢丝绳...” 主要考查您对机械效率的计算
滑轮(组)的机械效率
杠杆的平衡条件
等考点的理解。关于这些考点您可以点击下面的选项卡查看详细档案。
- 机械效率的计算
- 滑轮(组)的机械效率
- 杠杆的平衡条件
有用功跟总功的比值叫做机械效率;
计算公式:
η=

机械效率的意义:
(1)机械效率的功率是标志机械做功性能好坏的物理量,机械效率越高,这个机械的性能越好。
(2)机械效率的高度并不决定使用机械是省力还是费力,效率高只说明有用功在总功所占的比例;省力还是费力是指做一定的有用功时,所用动力的大小。机械效率高不一定省力。
功,功率和机械效率的比较:
| 物理量 | 物理意义 | 定义 | 符号 | 公式 | 单位 | 说明 |
| 功 | 做功即能量的转化 | 有力作用在物体上,并且物体在力的方向上移动了一段距离,就说力对物体做了功 | W | W=Fs | J | l. 功率大小由功和时间共同决定,单独强调某一方面是错误的 2.功率和机械效率是两个不同的物理量,它们之问没有直接关系 |
| 功率 | 做功快慢 | 单位时间内完成的功 | P |  |
W(国际单位) kW,MW(常用单位) | |
| 机械效率 | 反映机械性能的物理量 | 有用功占总功的总值 | η |  |
无 |
汽车的机械效率和功率:
机械效率与功率是两个完全不同的概念。
这两个物理量是从不同方面反映机械性能的,它们之间没有必然的联系。
功率大表示机械做功快;机械效率高表示机械对总功的利用率高。功率大的机械不一定机械效率高。内燃机车功率可以达到几千千瓦,但效率只有30%r~ 40%,反之,机械效率高的机械功率不一定大。安装在儿童玩具汽车里的电动机效率可达80%,但功率却只有凡瓦特。
| 有用功 | W有用=Gh |
| 总功 | W总=Fs W总=Gh+G动h (不计绳重,摩擦) |
| 额外功 | W额外=W总-W有用 W额外=G动h (不计绳重,摩擦) |
| 机械效率 |  (n为承担重物绳的股数) (n为承担重物绳的股数) (不计绳重,摩擦) (不计绳重,摩擦) |
测量滑轮组的机械效率:
①器材:弹簧测力计、刻度尺、滑轮组
②原理:η=

③步骤:先用弹簧测力计测出物体的重力G,再按要求组装滑轮组,用弹簧测力计提起绳端匀速上升,测出作用于绳端的作用力F,确定重物和绳自由端的始、末位置,用刻度尺测出物体上升的距离h和绳子末端移动的距离s,再用公式求出滑轮组的机械效率η ;
④注意事项:一是要用弹簧测力计提起绳端匀速上升,二是要让绳端竖直上升。
提高滑轮组机械效率的方法:
1.影响滑轮组机械效率的因素滑轮组是人们经常使用的简单机械,用同一滑轮组提升物体G升高h时,滑轮组对物体做的功为有用功,而人对滑轮组的拉力F做的功为总功,F移动的距离s=nh(n为与动滑轮相连绳子的段数),则滑轮组的机械效率
 ;若不计摩擦力,而动滑轮的重为G’,那么提升动滑轮做的功就是额外功,则滑轮组的机械效率还可表示为
;若不计摩擦力,而动滑轮的重为G’,那么提升动滑轮做的功就是额外功,则滑轮组的机械效率还可表示为
 。讨论这个表达式可知,对于同一滑轮组(G’一定),提升重物越重,滑轮组的机械效率越高;而提升相同重物时,动滑轮越少、越轻的滑轮组,机械效率越高。
。讨论这个表达式可知,对于同一滑轮组(G’一定),提升重物越重,滑轮组的机械效率越高;而提升相同重物时,动滑轮越少、越轻的滑轮组,机械效率越高。2.提高滑轮组机械效率的方法
(1)减小额外功在总功中占的比例。可采取改进机械结构、减小摩擦阻力等方法。如可使滑轮组在满载情况下工作,以增大有用功在总功中的比例,在滑轮的转轴中加润滑油,以减小摩擦阻力,或减小滑轮组中动滑轮的自重等,即在有用功一定的情况下,减小额外功,提高效率。
(2)增大有用功在总功中所占的比例,在额外功不变的情况下,增大有用功的大小。
(3)换用最简单的机械。
滑轮组拉物体水平前进时的机械效率:
| W有用 | W额外 | W总 | η | |
 拉力F、物重G、物体匀速移动时与地面摩擦力f、物体移动距离s物、拉力F移动距离s |
W有用=f·s物 | —— | W总=F·s=F·ns物 |  n为绳子股数 |
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂。
即
在杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之几。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
例:如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO= 2OB。固定D点,使OB处于水平位置,此时B端挂一重为40N的物体,要使杠杆不发生转动,至少需在A端施加F=____N的力,在图上画出此时力F的方向。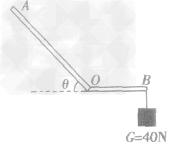
解析:要想得到施加在A点的最小力,就要找到最大力臂,由图可知,最大力臂应是OA,故过A点作们的垂线,方向斜向下即为最小力。据杠杆平衡条件得:F·OA=G·OB,代入数值为F×2OB=40N×OB,解方程得F=20N。
答案:20 力F的方向如图
实验法探究杠杆平衡条件:
实验前要调节杠杆的平衡螺母使其在水平位置上平衡,目的是使杠杆的重心落在支点上,从而消除杠杆的重力对平衡的影响。当杠杆水平平衡时,O点距悬挂钩码处的距离便是力臂,而且可用杠杆上的“格数”代替力臂大小。
例:我们都做过“探究杠杆平衡条件”的实验。
(1)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。实验前使杠杆水平平衡的目的是____.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒大家不要采用这种方式。这主要是因为该种方式( )
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第____格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。 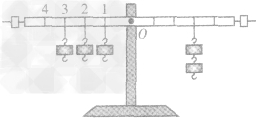
解析:(1)实验前要调节杠杆的平衡螺母使其在水平位置平衡,目的是方便地测量力臂。调节方法是将平衡螺母向杠杆偏高的一端调,即哪端轻向哪端调。
(2)探究杠杆平衡条件时,用的力和力臂数目过多,每个力都会给杠杆转动带来影响,给探究过程带来麻烦。
(3)根据杠杆平衡条件 ,即
,即
 ,所以l1=2(格)。
,所以l1=2(格)。
答案:(1)右方便地测量力臂(2)D(3)2
利用杠杆平衡条件求最小力的方法:
由公式 可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
1.寻找最大动力臂的方法
(1)当动力作用点确定后,支点到动力作用点的线段即为最大动力臂;
(2)动力作用点没有规定时,应看杠杆上哪一点离支点最远,则这一点到支点的距离即为最大动力臂。
2.作最小动力的方法
(1)找到最大动力臂后,过作用点作动力臂的垂线;
(2)根据实际,动力能使杠杆沿阻力作用的反方向转动,从而确定动力的方向。
与“下图是汽车起重机从某深坑中起吊重物的示意图。A是动滑轮,B...”考查相似的试题有:
- 在10m高的河堤上,安装了一台20kW的水泵,它的机械效率为60%,求每分钟可抽上多少吨水?(g=10N/kg)
- 一辆小汽车正在匀速爬上六盘山一段坡长是1 000 m、坡高h是60 m的盘山路,小汽车的质量m是1 000 kg,小汽车的牵引力F是720 N....
- 利用如图所示装置将重为200N的物体A匀速从斜面的底端拉到顶端.已知斜面的长是5m,高是2m,拉力F=100N;求在此过程中所做的有...
- 如图所示,用两个完全相同的滑轮,匀速提升质量相等的物体。且物体质量大于滑轮质量,不计绳重和摩擦。比较甲、乙两种方式可...
- 程跃要提起重800 N的物体,但是他的最大拉力只有300N.于是,他找来了一些滑轮,想利用滑轮组提起这个重物.(1)已知每个滑轮...
- 图甲所示的杠杆是平衡的。若如图乙所示,在支点两侧的物体下方分别加挂一个等量的物体,杠杆[ ]A.仍能平衡B.不能平衡,A端...
- 一根长1m左右、粗细均匀的细木棒,一个已知质量为m的钩码,一把刻度尺,还有一些细绳和一只铅笔.只用这些器材如何测出这根细...
- 下面举出的是几种根据杠杆原理制成的工具:A.钳子;B.铡刀;C.镊子;D.理发剪子;E.剪铁皮剪子;F.天平;G.定滑轮;H.起钉锤...
- 一个杆秤,如果秤砣被磨损掉一部分,用它称得的质量将比物体的实际质量:[ ]A.偏大B.偏小C.相等D.无法判断
- 在做“研究杠杆平衡条件”的实验中,挂钩码前,使杠杆在水平位置平衡,实验中只有10个相同的钩码,杠杆上每格等距,当在A点挂上...