本试题 “将大桥的结构进行简化,取其部分可抽象成如图丁所示的模型,(1)可以看出它用到了______的相关知识.其中O是______,______代表桥重和过往车辆等产生的对桥...” 主要考查您对杠杆及其五要素
杠杆的平衡条件
杠杆的应用
等考点的理解。关于这些考点您可以点击下面的选项卡查看详细档案。
- 杠杆及其五要素
- 杠杆的平衡条件
- 杠杆的应用
一根在力的作用下能绕着固定点转动的硬棒就叫杠杆。

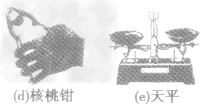
和杠杆的五要素:
①支点:杠杆绕着转动的点(o)
②动力:使杠杆转动的力(F1)
③阻力:阻碍杠杆转动的力(F2)
④动力臂:从支点到动力的作用线的距离(L1)。
⑤阻力臂:从支点到阻力作用线的距离(L2) 。
一根硬棒成为杠杆的条件:
①要有力的作用
②能绕某固定点转到
对概念的理解:
(1)杠杆可以是直的,也可以是弯的。,但在外力的作用下不能变形。例如:撬棒、跷跷板、抽水机、手柄等。
(2)定义中的力,是指作用在杠杆上的动力和阻力,且动力和阻力使杠杆转动的方向一定是相反的,但动力和阻力不一定相反。
(3)杠杆在力的作用下,绕固定点转动而不是平动。
(4)不论动力和阻力,杠杆都是受力物体,作用于杠杆的物体都是施力物体。
(5)阻力绕支点转动的方向与动力绕支点转动的方向相反。
(6)不可把从动力作用点到支点的距离作为动力臂,或把从阻力作用点到支点的距离作为阻力臂。
生活中杠杆支点的辨别方法:
支点是相对于杠杆不动的点,但支点一定在杠杆上,支点不一定与动力作用点和阻力作用点在同一直线上,也不一定在动力作用点和阻力作用点之间。若让力的作用线恰好过支点,则力臂是零,这个力不能使杠杆转动。
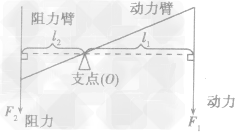
例:列车上有出售食品的手推车(如图所示)。若货物在车内摆放均匀,当前轮遇到障碍物A时,售货员向下按扶把,这时手推车可以视为杠杆,支点是____ ,(写出字母);当后轮遇到障碍物A时,售货员向上提扶把,这时支点是____。
解析:把手推车视为杠杆,当前轮口遇到阻碍时,在E点向下用力时,车身转动;而车轮C却保持相对静止,所以C点为支点;当后轮C遇到阻碍时,人从 E点向上用力,车身转动而车轮B点相对静止。所以此时的支点为B点。
答案:C B
简单机械知识梳理:
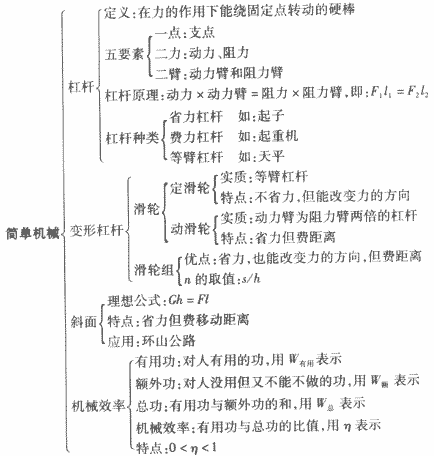
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂。
即
在杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之几。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
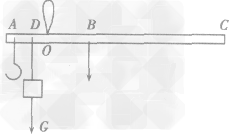
例:如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO= 2OB。固定D点,使OB处于水平位置,此时B端挂一重为40N的物体,要使杠杆不发生转动,至少需在A端施加F=____N的力,在图上画出此时力F的方向。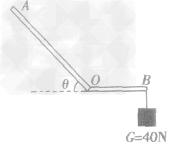
解析:要想得到施加在A点的最小力,就要找到最大力臂,由图可知,最大力臂应是OA,故过A点作们的垂线,方向斜向下即为最小力。据杠杆平衡条件得:F·OA=G·OB,代入数值为F×2OB=40N×OB,解方程得F=20N。
答案:20 力F的方向如图
实验法探究杠杆平衡条件:
实验前要调节杠杆的平衡螺母使其在水平位置上平衡,目的是使杠杆的重心落在支点上,从而消除杠杆的重力对平衡的影响。当杠杆水平平衡时,O点距悬挂钩码处的距离便是力臂,而且可用杠杆上的“格数”代替力臂大小。
例:我们都做过“探究杠杆平衡条件”的实验。
(1)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。实验前使杠杆水平平衡的目的是____.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒大家不要采用这种方式。这主要是因为该种方式( )
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第____格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。 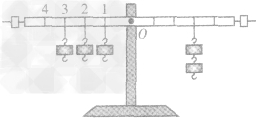
解析:(1)实验前要调节杠杆的平衡螺母使其在水平位置平衡,目的是方便地测量力臂。调节方法是将平衡螺母向杠杆偏高的一端调,即哪端轻向哪端调。
(2)探究杠杆平衡条件时,用的力和力臂数目过多,每个力都会给杠杆转动带来影响,给探究过程带来麻烦。
(3)根据杠杆平衡条件 ,即
,即
 ,所以l1=2(格)。
,所以l1=2(格)。
答案:(1)右方便地测量力臂(2)D(3)2
利用杠杆平衡条件求最小力的方法:
由公式 可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
1.寻找最大动力臂的方法
(1)当动力作用点确定后,支点到动力作用点的线段即为最大动力臂;
(2)动力作用点没有规定时,应看杠杆上哪一点离支点最远,则这一点到支点的距离即为最大动力臂。
2.作最小动力的方法
(1)找到最大动力臂后,过作用点作动力臂的垂线;
(2)根据实际,动力能使杠杆沿阻力作用的反方向转动,从而确定动力的方向。
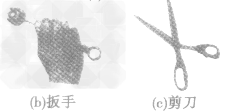
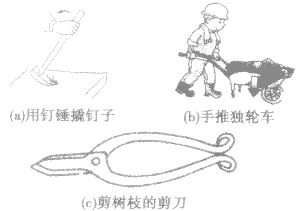
(1)省力杠杆:钉锤、手推车、剪树枝的剪刀等(如图)。
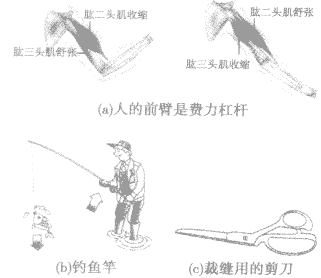
(2)费力杠杆:人的前臂、钓鱼竿、裁缝用的剪刀等 (如图)。
(3)等臂杠杆:天平

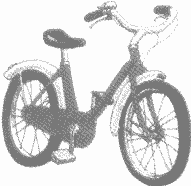
自行车中的杠杆:
自行车(如图)由许多的简单机械构成,其中就包括各种各样的杠杆:
(1)控制前轮转向的杠杆——车把。这是一个省力杠杆,人们用很小的力就能转动自行车前轮,达到控制自行车运动方向和平衡的目的。
(2)控制刹车闸的杠杆——车把上的闸把。这也是一个省力杠杆,人们用很小的力就能拉动车闸,使其以比较大的压力压到车轮的钢圈上,与钢圈产生一定的摩擦力,使钢圈转速变慢或停止转动,从而达到减速的目的。
(3)支持人重和货重的杠杆——三角杠、货架、前叉、后三角杠。这里的杠杆的主要目的是形成车身和承重。
另外,在自行车上还有卡下杆的变形——轮轴。例如,自行车中轴上的脚蹬和花盘齿轮组成省力轮轴,因为脚蹬半径大于花盘齿轮的半径;车把与前叉轴组成省力轮轴,因为手握车把的半径大于前叉轴的半径;自行车后轴上的齿轮和后轮组成费力轮轴,因为齿轮的半径小于后轮的半径。
杆秤:
杆秤是利用杠杆平衡条件制成的。如图所示,秤杆上提绳的D点为支点,由于支点不在秤杆(包括秤钩)的重心B点上,在不称物体时,手提绳,秤杆不能平衡于水平位置,此时必须把秤砣挂在适当的位置D点上,才能使秤杆平衡。D点就是杆秤的零刻度线,通常叫定盘星。(如图所示)
秤杆上从定盘星开始刻度是均匀的,用等分法可以确定杆秤的刻度。
根据杠杆的平衡条件,改变支点的位置(即在秤钩处加上一个提绳),这样又可以用上面的方法刻出新的刻度来。一般的杆秤都备有两个提纽,两套刻度.大大增加了秤的称量范围。
与“将大桥的结构进行简化,取其部分可抽象成如图丁所示的模型,...”考查相似的试题有:
- 今天,小明是学校的升旗手,他将一面国旗在国歌声中匀速升到旗杆顶端。(1)旗杆顶端装有定滑轮,利用它来升国旗,目的是改变...
- 一个600N重的成年人和一个小孩都过一道5m宽的水渠。成人从左岸到右岸,而小孩从水渠右岸到左岸,两岸各有一块4m长的坚实木板...
- 在探究“杠杆的平衡条件”的实验中,某同学记录了三次实验数据如下表:实验次数动力F1/N动力臂L1/m阻力F2/N阻力臂L2/m12.00.044...
- 如图所示是我们日常工作生活中所使用到的机械,按图中所示的情景使用过程中没有省力的是( )A.抛石机B.方向盘C.辘轳D.斜面
- 小华探究杠杆平衡条件时,使用的每个钩码的质量均为50g,杠杆上相邻刻线间的距离相等。小华将杠杆调节水平平衡后,在杠杆上的...
- 如图所示,是拉杆式旅行箱的示意图,使用时它相当于一个杠杆,支点为0点,箱内质量分布均匀,拉杆质量不计。请在图中画出阻力...
- 皮划艇是奥运会的竞赛项目之一,已知比赛中皮划艇船桨的阻力臂是动力臂的3倍,则船桨是______杠杆(选填“省力”、“省距离”或“...
- 如图所示,杠杆处于平衡状态,若在两边的钩码下,各加一个同样的钩码,则[ ]A. 杠杆仍平衡B. 杠杆右端下降C. 杠杆左端下降D. ...
- 如图所示为家庭电路常用的两种墙壁开关,其按钮可绕面板内某轴转动.根据你的生活经验,你认为______较易损坏,这是因为按动...
- 如图所示,在“研究杠杆平衡条件”实验中,所用器材有带刻度的杠杆、铁架台、弹簧秤、弹簧夹和______等,实验前,先把杠杆的中...