本试题 “如图所示是某同学做俯卧撑时的示意图,他的质量为56kg.身体可视为杠杆,O点为支点.A点为其身体重心.每次俯卧撑他肩膀向上撑起40cm.( g=10N/kg )(1)该...” 主要考查您对功率的计算
重力的计算
杠杆的平衡条件
等考点的理解。关于这些考点您可以点击下面的选项卡查看详细档案。
- 功率的计算
- 重力的计算
- 杠杆的平衡条件
(1)P=W/t,其中P代表功率,单位为W,W代表功,单位为J;t代表时间,单位为s。
(2)因为P=W/t,W=Fs,v=s/t,所以P=W/t=Fs/t=Fv,P=Fv是功率的又一表达式。
公式法计算功率:
运用 时一定要注意三个量的对应关系。“W”一定是对应“t”完成的,不能张冠李戴。单位要统一,P、W、t的单位分别为瓦、焦、秒。
时一定要注意三个量的对应关系。“W”一定是对应“t”完成的,不能张冠李戴。单位要统一,P、W、t的单位分别为瓦、焦、秒。
例1 如图所示,铁明同学向上跳台阶进行晨练,铁明重500N,在10s内匀速连跳12个台阶,每个台阶的高度为0.2m。在这个过程中,已知铁明克服摩擦做功为2800J,求出此过程中:
(1)铁明竖直向上跳的平均速率多大?
(2)铁明克服重力做功是多少?
(3)铁明做功的总功率多大?
解析:竖直向上跳的平均速度可以通过向上跳的总高度与所用时间利用速度公式 求出,克服重力做功等于重力与高度的乘积,即
求出,克服重力做功等于重力与高度的乘积,即 ,总功率可以通过所做的总功和时间利用功率公式
,总功率可以通过所做的总功和时间利用功率公式 求得。
求得。
(1) 0.24m/s
0.24m/s
(2)
(3)
例2在打捞海底沉船时,常用水下机器人潜入水下打捞船上物品,已知ρ海水=1.03×103kg/m3。
(1)机器人在水下70m处受到海水产生的压强是多大?
(2)某时刻机器人在水下用竖直向上的力举着体积为0.02m3,密度为2.7×103kg/m3的物体静止不动,求该力的大小。
(3)若机器人在水下运动时,所受海水阻力与速度的关系如图所示,求机器人在水下以0.5m/s的水平速度匀速运动时,机器人水平推进力的功率。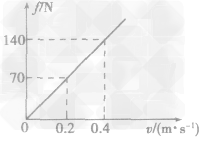
解析:(1)由液体压强公式 得,
得, ,
,
(2)物体在水下受平衡力的作用,则
则


(3)由题图可知,海水阻力与机器人的运动速度成正比,当机器人运动速度为0.5m/s时,f=175N 机器人匀速前进时,机器人水平推进力F=f
P=Fv=175N×0.5m/s=87.5W
答案:(1)7.21×105Pa(2)334N(3)87.5W
物体所受的重力跟它的质量成正比,g=
 ,G=mg。(g=9.8N/g)
,G=mg。(g=9.8N/g)重力与质量的区别和联系:
| 质量 | 重力 | ||
| 区别 | 概念 | 物体所含物质的多少 | 由于地球吸引而使物体受到的力 |
| 符号 | m | G | |
| 量性 | 只有大小,没有方向 | 既有大小,又有方向 | |
| 单位 | 千克(kg) | 牛顿(N) | |
| 与地理位置的关系 | 与位置无关 | 与位置有关 | |
| 公式 | m=ρV | G=mg | |
| 测量工具 | 天平 | 测力计 | |
| 联系 | 重力与质量的关系是G=mg(g=9.8N/kg) | ||
重力加速度:
重力加速度g的方向总是竖直向下的。在同一地区的同一高度,任何物体的重力加速度都是相同的。重力加速度的数值随海拔高度增大而减小。当物体距地面高度远远小于地球半径时,g变化不大。而离地面高度较大时,重力加速度g数值显著减小,此时不能认为g为常数。
距离地面同一高度的重力加速度,也会随着纬度的升高而变大。由于重力是万有引力的一个分力,万有引力的另一个分力提供了物体绕地轴作圆周运动所需要的向心力。物体所处的地理位置纬度越高,圆周运动轨道半径越小,需要的向心力也越小,重力将随之增大,重力加速度也变大。地理南北两极处的圆周运动轨道半径为0,需要的向心力也为0,重力等于万有引力,此时的重力加速度也达到最大。
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂。
即
在杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之几。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
例:如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO= 2OB。固定D点,使OB处于水平位置,此时B端挂一重为40N的物体,要使杠杆不发生转动,至少需在A端施加F=____N的力,在图上画出此时力F的方向。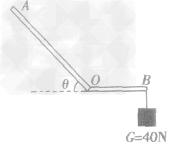
解析:要想得到施加在A点的最小力,就要找到最大力臂,由图可知,最大力臂应是OA,故过A点作们的垂线,方向斜向下即为最小力。据杠杆平衡条件得:F·OA=G·OB,代入数值为F×2OB=40N×OB,解方程得F=20N。
答案:20 力F的方向如图
实验法探究杠杆平衡条件:
实验前要调节杠杆的平衡螺母使其在水平位置上平衡,目的是使杠杆的重心落在支点上,从而消除杠杆的重力对平衡的影响。当杠杆水平平衡时,O点距悬挂钩码处的距离便是力臂,而且可用杠杆上的“格数”代替力臂大小。
例:我们都做过“探究杠杆平衡条件”的实验。
(1)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。实验前使杠杆水平平衡的目的是____.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒大家不要采用这种方式。这主要是因为该种方式( )
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第____格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。 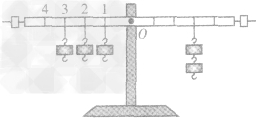
解析:(1)实验前要调节杠杆的平衡螺母使其在水平位置平衡,目的是方便地测量力臂。调节方法是将平衡螺母向杠杆偏高的一端调,即哪端轻向哪端调。
(2)探究杠杆平衡条件时,用的力和力臂数目过多,每个力都会给杠杆转动带来影响,给探究过程带来麻烦。
(3)根据杠杆平衡条件 ,即
,即
 ,所以l1=2(格)。
,所以l1=2(格)。
答案:(1)右方便地测量力臂(2)D(3)2
利用杠杆平衡条件求最小力的方法:
由公式 可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
1.寻找最大动力臂的方法
(1)当动力作用点确定后,支点到动力作用点的线段即为最大动力臂;
(2)动力作用点没有规定时,应看杠杆上哪一点离支点最远,则这一点到支点的距离即为最大动力臂。
2.作最小动力的方法
(1)找到最大动力臂后,过作用点作动力臂的垂线;
(2)根据实际,动力能使杠杆沿阻力作用的反方向转动,从而确定动力的方向。
与“如图所示是某同学做俯卧撑时的示意图,他的质量为56kg.身体...”考查相似的试题有:
- 甲、乙两名同学爬楼,甲的体重是500N,乙的体重是600N,两人同时从一楼开始爬,恰好同时到达五楼,则______同学做的功多,___...
- 一木块体积为100cm3,密度为0.6×103kg/m3.求:(1)当用手把它全部按入水中时,木块受到的浮力为多大?(2)松手后静止时受...
- 地面附近的物体由于______叫做重力,重力的方向______;作用点在______.计算重力的公式______.物体所受的重力与物体的质量...
- 汶川大地震后形成的次生灾害--堰塞湖严重威胁着灾区人民的生命安全,如图是米26直升飞机克服“蜀道之难,难于上青天”的壮举--...
- 如图所示,密度为0.6×103kg/m3的正方体木块,放入盛有水的容器中,此时木块的下表面距水面3cm,请根据所学的物理知识,至少计...
- 竖直向上抛出质量为0.2千克的物体,物体在运动中受到的空气阻力总是与运动方向相反,大小都为1牛,物体的重力为______牛,物...
- 把一个外观体积为17.8cm3的空心铜球放入水中,它恰好处于悬浮状态.已知铜的密度是8.9×103kg/m3,g取10N/kg,求:(1)空心铜...
- 一台起重机用59000N的拉力吊起质量为5t的货物,则货物所受的合力为______N,方向是______.(g=10N/kg)
- 在312国道上,一辆装载货物后总质量为10t的汽车正水平匀速向西行驶,汽车的水平牵引力是1.3×104N,则这辆汽车在水平方向上受...
- 高压起重气垫是一种适合于地震救灾的起重工具。它由如图甲所示的高压气瓶、气管、阀门与气垫连接而成。起重时,气垫放入重物...