本试题 “(1)如图1所示,为自行车脚踏板的示意图,作用在脚踏板上的力为F。请在图中画出该力的力臂。(2)如图2所示,铡刀工作时的动力F1,O为支点。请在图中作出动...” 主要考查您对杠杆的平衡条件
力臂的画法
滑轮组的设计与组装
等考点的理解。关于这些考点您可以点击下面的选项卡查看详细档案。
- 杠杆的平衡条件
- 力臂的画法
- 滑轮组的设计与组装
杠杆的平衡条件:
动力×动力臂=阻力×阻力臂。
即
在杠杆平衡时,动力臂是阻力臂的几倍,动力就是阻力的几分之几。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
例:如图所示,AOB为一机械设备的简化示意图,我们可以把它看成杠杆(自重不计),已知AO= 2OB。固定D点,使OB处于水平位置,此时B端挂一重为40N的物体,要使杠杆不发生转动,至少需在A端施加F=____N的力,在图上画出此时力F的方向。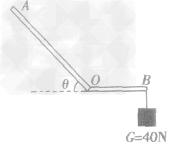
解析:要想得到施加在A点的最小力,就要找到最大力臂,由图可知,最大力臂应是OA,故过A点作们的垂线,方向斜向下即为最小力。据杠杆平衡条件得:F·OA=G·OB,代入数值为F×2OB=40N×OB,解方程得F=20N。
答案:20 力F的方向如图
实验法探究杠杆平衡条件:
实验前要调节杠杆的平衡螺母使其在水平位置上平衡,目的是使杠杆的重心落在支点上,从而消除杠杆的重力对平衡的影响。当杠杆水平平衡时,O点距悬挂钩码处的距离便是力臂,而且可用杠杆上的“格数”代替力臂大小。
例:我们都做过“探究杠杆平衡条件”的实验。
(1)实验没有挂钩码时,若杠杆左端下倾,则应将右端的平衡螺母向____(选填“左”或“右”)调节,使杠杆在水平位置平衡。实验前使杠杆水平平衡的目的是____.
(2)实验中,用图所示的方式悬挂钩码,杠杆也能水平平衡(杠杆上每格等距),但老师却提醒大家不要采用这种方式。这主要是因为该种方式( )
A.一个人无法独立操作
B.需要使用太多的钩码
C.力臂与杠杆不重合
D.力和力臂数目过多
(3)图中,不改变支点O右侧所挂的两个钩码及其位置,保持左侧第____格的钩码不动,将左侧另外两个钩码改挂到它的下方,杠杆仍可以水平平衡。 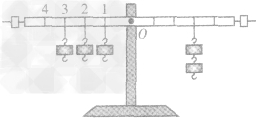
解析:(1)实验前要调节杠杆的平衡螺母使其在水平位置平衡,目的是方便地测量力臂。调节方法是将平衡螺母向杠杆偏高的一端调,即哪端轻向哪端调。
(2)探究杠杆平衡条件时,用的力和力臂数目过多,每个力都会给杠杆转动带来影响,给探究过程带来麻烦。
(3)根据杠杆平衡条件 ,即
,即
 ,所以l1=2(格)。
,所以l1=2(格)。
答案:(1)右方便地测量力臂(2)D(3)2
利用杠杆平衡条件求最小力的方法:
由公式 可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
可知,当阻力、阻力臂一定时,动力臂越长,动力越小。当动力臂最长时,动力最小。要求最小动力,必须先画出最大动力臂。
1.寻找最大动力臂的方法
(1)当动力作用点确定后,支点到动力作用点的线段即为最大动力臂;
(2)动力作用点没有规定时,应看杠杆上哪一点离支点最远,则这一点到支点的距离即为最大动力臂。
2.作最小动力的方法
(1)找到最大动力臂后,过作用点作动力臂的垂线;
(2)根据实际,动力能使杠杆沿阻力作用的反方向转动,从而确定动力的方向。
物体绕定轴或定点转动时,由力的作用线至转轴或定点间的垂直距离。
杠杆力臂的画法——一找点、二画线、三作垂线段
1.首先在杠杆的示意图上,确定支点O。
2.画好动力作用线及阻力作用线,画的时候要用虚线将力的作用线延长。
3.再从支点O向力的作用线引垂线,画出垂足。则从支点到垂足的距离就是力臂,力臂用虚线(或实线) 表示并用大括号标明,在旁边标上字母l1或l2,分别表示动力臂或阻力臂。
1、确定“n”。根据题意确定由多少段绳子承担动滑轮重力和物体重力。
2、确定动滑轮个数。
(1)、当n为偶数时,动滑轮的个数是:

(2)、当n为奇数时,动滑轮的个数是:

3、确定定滑轮的个数。口诀:“一动配一定,偶数减一定,变向加一定。”
(1)在不改变施力的方向时,以动滑轮个数为基数,按“一动配一定,偶数减一定”来确定定滑轮的个数。即:一个动滑轮配一个定滑轮;但当n为偶数时,定滑轮的个数等于“动滑轮的个数减一个”。
(2)在需要改变施力的方向时,仍以动滑轮的个数为基数,按“变向加一定”的方法确定定滑轮的个数。即:在“一动配一定,偶数减一定”的基数上,再加上一个定滑轮。
4、组装滑轮组。口诀:“奇动偶定”。确定好了动滑轮和定滑轮的个数后,再确定绳子的起始点。
(1)当n为奇数时,绳子的起始点从动滑轮开始,经定滑轮依次按画螺旋线的方法绕线。
(2)当n为偶数时,绳子的起始点从定滑轮开始,经动滑轮依次按画螺旋线的方法绕线。
滑轮组的绕线问题:
一般来说,在给滑轮组绕线时,首先要确定承担物重的绳子股数n,然后根据“奇动偶定,由内向外”的原则绕绳。“奇、偶”是指承担物重的绳子股数,“动、定” 是指动滑轮和定滑轮。即如果n是奇数,则绳子起始端在动滑轮的小钩上开始绕起;如果n是偶数,则绳子起始端从定滑轮的小钩上开始绕起。需要注意的是:在绕线时,所画的线要直,并且要与两个滑轮外侧相切;在一般情况下,要在最后一股 (最外层)绳子的末端用箭头标出拉力的方向。在中考中此类问题包括以下几种类型:
(1)已知滑轮组的省力情况
(2)未知滑轮组的省力情况
(3)根据特定要求绕线确定滑轮组绕线时要注意一些特殊的要求,比如 “最省力”、“人要站在地面上”、“向上拉”等,还要符合一定的物理情景。
例1完成图示滑轮组的绕线。
解析:根据绕线规律“奇动偶定”n=3或n=5为奇数,(1)(2)(4)绳子的起点在动滑轮上,n=4为偶数,所以(3)绳子的起点在定滑轮上。
答案:如图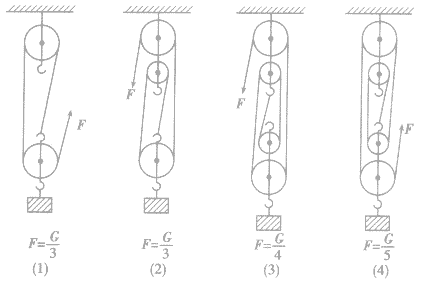
组装滑轮组的方法:
要正确组装滑轮组,首先要根据题意算出承担物重的绳子的股数n,然后再根据“奇动偶定”的原则组装滑轮组,即当n为奇数时,绳子的起始端系在动滑轮上,当n为偶数时,绳子的起始端系在定滑轮上。
例一条绳子最多能承受1000N的拉力。请设计一个滑轮组,用这条绳子吊起3300N的重物,画出滑轮组安装示意图。
解析:先确定绳子股数: , n的取值应为4;根据“奇动偶定”原则绳子固定端应在定滑轮上,若改变力的方向,绕法如图乙所示;若不改变力的方向,绕法如图甲所示。
, n的取值应为4;根据“奇动偶定”原则绳子固定端应在定滑轮上,若改变力的方向,绕法如图乙所示;若不改变力的方向,绕法如图甲所示。
答案: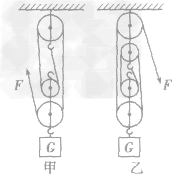
与“(1)如图1所示,为自行车脚踏板的示意图,作用在脚踏板上的...”考查相似的试题有:
- 在“研究杠杆平衡条件”实验中(1)实验前出现图甲所示情况,为了使杠杆在水平位置平衡,应将杠杆左端的螺母向_________调。(...
- 如图所示的杠杆中,属于费力杠杠的是[ ]A.B.C.D.
- 如图所示,已知OA是OB的两倍,物体重为G,F为动力,方向竖直向下,该杠杆属于 ______杠杆(填“省力”或“费力”),要使杠杆在水...
- 如图所示,动滑轮重0.5N,物体重3.5N,当OA=2OB时,为使轻质杠杆保持水平平衡、在A端所加的力应为(不计摩擦)( )A.4NB.2...
- 如图所示为自行车脚踏板的示意图,现用80N力沿虚线方向作用在脚踏板A点上使车前进,请在图中用力的图示法表示出该力,并画出...
- (1)如图1重10N的小球对斜面的压力为6N,用力的示意图作出重力(2)如图2所示,站在地面上的小宇同学想要利用滑轮组将重物提...
- 请你组装图所示的滑轮组,要求使用此滑轮组提升重物时最省力
- (1)图甲中OC是折射光线,请在图中画出入射光线AO和反射光线OB的大致位置(2)在图乙中选一个机械,画出用100N提起300N重物...
- 按照题目要求作图:(1)图(1)中ABO可看成杠杆O为支点,请在图中画出该杠杆的动力臂和所受阻力的示意图.(2)图(2)中,...
- 小明做“测滑轮组机械效率”实验时,用图中所示的滑轮,组装成滑轮组,(1)请在图中画出使用该滑轮组时最省力的绕法。用此滑轮...